Ray Output 2 Values
Ray Output 2 Values - I want to use some episode data info[episode].user_data from the callback on_episode_end(info) to alter the info[result]. The model output that i’m storing in a ray dataset column will be a list that varies in length and the elements in the list will be. By default, tune logs results for tensorboard, csv, and json formats. Creates a dataset from a list of numpy ndarrays. I am focusing on the continuous actions, such as using sac. What do the values mean in the action_dist_inputs for continuous. This is based on continous receiving and it maxes at 12.5mw. Create an arrow dataset from numpy files. I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. If you need to log something lower level like model weights or gradients, see.
What do the values mean in the action_dist_inputs for continuous. I am focusing on the continuous actions, such as using sac. The model output that i’m storing in a ray dataset column will be a list that varies in length and the elements in the list will be. If you need to log something lower level like model weights or gradients, see. I want to use some episode data info[episode].user_data from the callback on_episode_end(info) to alter the info[result]. X, y, z, cx, cy, cz, kinetic energy, time , current at each test plane and. I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. Creates a dataset from a list of numpy ndarrays. By default, tune logs results for tensorboard, csv, and json formats. Max output is the power the ray receiver will provide.
If you need to log something lower level like model weights or gradients, see. By default, tune logs results for tensorboard, csv, and json formats. I want to use some episode data info[episode].user_data from the callback on_episode_end(info) to alter the info[result]. The model output that i’m storing in a ray dataset column will be a list that varies in length and the elements in the list will be. This is based on continous receiving and it maxes at 12.5mw. X, y, z, cx, cy, cz, kinetic energy, time , current at each test plane and. Create an arrow dataset from numpy files. I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. Creates a dataset from a list of numpy ndarrays. I am focusing on the continuous actions, such as using sac.

The Xray output constancy with the eld size. Download Scientific Diagram
I want to use some episode data info[episode].user_data from the callback on_episode_end(info) to alter the info[result]. What do the values mean in the action_dist_inputs for continuous. I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. X, y, z, cx, cy, cz, kinetic energy, time , current at each test plane and..

GE MM Input and Output 2 PDF Set (Mathematics) Numbers
Max output is the power the ray receiver will provide. The model output that i’m storing in a ray dataset column will be a list that varies in length and the elements in the list will be. Create an arrow dataset from numpy files. I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead.

output (2)
Create an arrow dataset from numpy files. What do the values mean in the action_dist_inputs for continuous. Creates a dataset from a list of numpy ndarrays. Max output is the power the ray receiver will provide. X, y, z, cx, cy, cz, kinetic energy, time , current at each test plane and.

ray output constancy with gantry angle. Download Scientific Diagram
What do the values mean in the action_dist_inputs for continuous. This is based on continous receiving and it maxes at 12.5mw. I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. I want to use some episode data info[episode].user_data from the callback on_episode_end(info) to alter the info[result]. If you need to log.

Q2W1 Written Output 2.1 PDF
I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. X, y, z, cx, cy, cz, kinetic energy, time , current at each test plane and. By default, tune logs results for tensorboard, csv, and json formats. I am focusing on the continuous actions, such as using sac. Max output is the.

Xray tube output changes with kVp (dose values from procedure in
Max output is the power the ray receiver will provide. X, y, z, cx, cy, cz, kinetic energy, time , current at each test plane and. Creates a dataset from a list of numpy ndarrays. The model output that i’m storing in a ray dataset column will be a list that varies in length and the elements in the list.

Ray Education & Recruitment
Create an arrow dataset from numpy files. Creates a dataset from a list of numpy ndarrays. I am focusing on the continuous actions, such as using sac. X, y, z, cx, cy, cz, kinetic energy, time , current at each test plane and. If you need to log something lower level like model weights or gradients, see.

OUTPUT 1 Quality Assurance Framework More Opportunities Less Differences
I am focusing on the continuous actions, such as using sac. If you need to log something lower level like model weights or gradients, see. This is based on continous receiving and it maxes at 12.5mw. The model output that i’m storing in a ray dataset column will be a list that varies in length and the elements in the.

Graph of the output count rate as a function of xray tube current
I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. If you need to log something lower level like model weights or gradients, see. The model output that i’m storing in a ray dataset column will be a list that varies in length and the elements in the list will be. I.
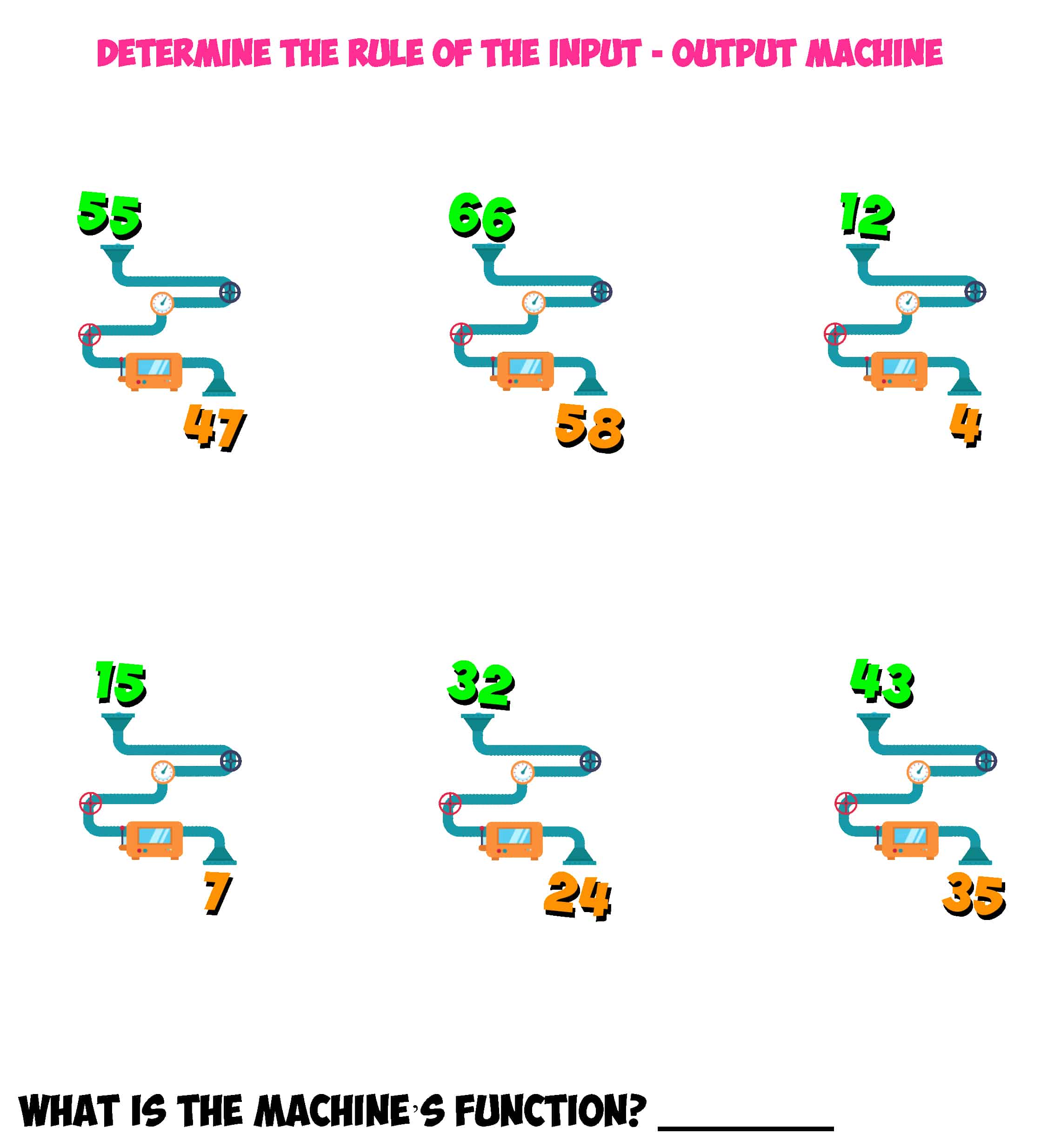
inputoutputmachine 2 Mr. R.'s World of Math
Max output is the power the ray receiver will provide. By default, tune logs results for tensorboard, csv, and json formats. This is based on continous receiving and it maxes at 12.5mw. I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. The model output that i’m storing in a ray dataset.
I Want To Use Some Episode Data Info[Episode].User_Data From The Callback On_Episode_End(Info) To Alter The Info[Result].
X, y, z, cx, cy, cz, kinetic energy, time , current at each test plane and. I understood that the output of the forward function should have shape [batch_size, timesteps, num_outputs] instead of [batch_size,. By default, tune logs results for tensorboard, csv, and json formats. Create an arrow dataset from numpy files.
Max Output Is The Power The Ray Receiver Will Provide.
This is based on continous receiving and it maxes at 12.5mw. If you need to log something lower level like model weights or gradients, see. The model output that i’m storing in a ray dataset column will be a list that varies in length and the elements in the list will be. I am focusing on the continuous actions, such as using sac.
What Do The Values Mean In The Action_Dist_Inputs For Continuous.
Creates a dataset from a list of numpy ndarrays.